
I am in this picture.
Hi Hello.
I am a Ph.D. student in robotics.
I aim to create algorithms that endow robots with the ability to operate autonomously alongside their human partners. My research interests lie at the intersection of planning and perception for robotics, driven by geometry and multimodal learning from data. I am broadly interested in estimation problems, machine learning, and inference, in micro-aerial, ground, and manipulation domains.
I spend most of my time at the lab or on the track a bicycle– here’s me trying to jump far:
Updates
- August 2022
- I have started working towards a Ph.D. in Robotics at the Carnegie Mellon University Robotics Institute.
- August 2021
- I have joined Indoor Robotics as a Robotics Algorithm Engineer.
- June 2021
- I have graduated from MIT with a Bachelor’s degree in Electrical Engineering and Computer Science, with a minor in Mathematics.
Feel free to Contact me! For professional inquiries, you are invited to my professional profile.
Recent projects:
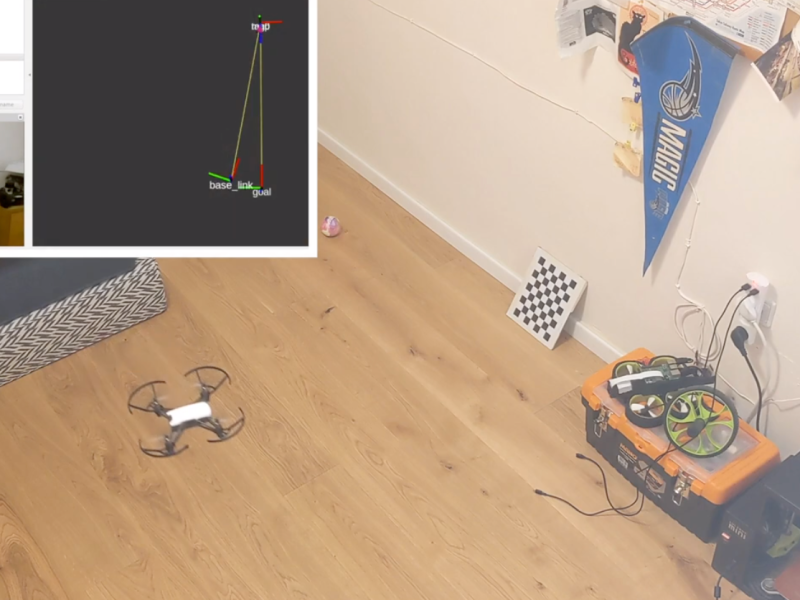
Robot Tello Drone = Botello.
Botello is here! Kinda, at least. My goal with this project is to create a robotic drone that would provide a foundation for later experimentation. Generally, take a look at the GitHub repo if you’re curious! It will be up to date. https://github.com/yoraish/botello

A Full Autonomous Stack, a Tutorial | ROS + Raspberry Pi + Arduino + SLAM
UPDATED September 2021: This guide is a walkthrough for setting up an autonomous ROS stack on a Raspberry Pi. Teleoperation, mapping, localization, and navigation are all covered! Update 2022-03-26 Thank you all who have reached out with questions and comments! I am always extremely happy to get your messages :). The TF-tree that you should…
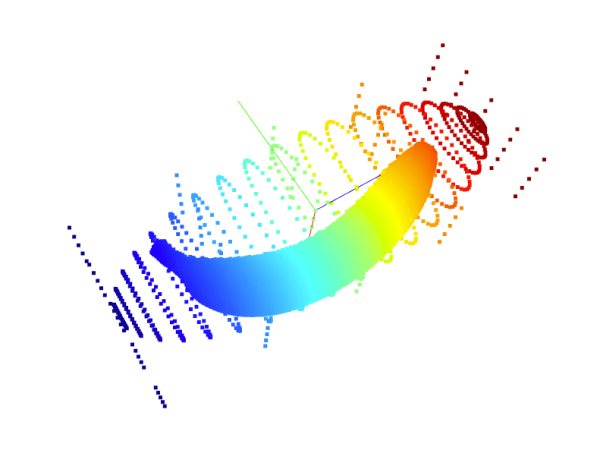
DELSE: Deforming Ellipsoids for object Shape Estimation
It is often important for robots to know the location and shape of objects. However, this task can be a bit tricky! Many times robots can only obtain partial observations due to self-occlusions or occlusions in the scene. In this project (which is approximately equivalent to half of an undergraduate senior- year research project, with…
